RPi2040 C Code Interrupt Example

- An Interrupt is just that - an interrupt of a running program to handle an event (mouse click, keyboard, video, hard drive - etc.)
- Interrupts actually have a long history. You can read about the history of the interrupt for the PC DOS from many years ago.
 Contributors to Wikimedia projects
Contributors to Wikimedia projects
I noticed that there was literally next to no working (or scarce, and I need to google for this all day) examples of Interrupt Handlers for the RPi2040 in terms of the C language.
- So. write this guide and put it all together for reference purposes.
If you are looking for a basic primer of how to write a interrupt handler in Python:
- Raspberry Pi GPIO Interrupt in Python
- Another very good tutorial from electrocredible.com
Because micropython execution speeds are estimated to be about 100 - 250x slower than embedded C. Micropython is great for some tinker projects like triggering on a button - but we want to get to the raw speed of the microcontroller - so we need to work in C, but that also makes development considerably more complex until you get used to it.
Writing an Interrupt Handler in C:
- Before you can compile C code for the RPi2040 there are some background work on setting up your Cmake / Development environment. The guide below will get you up and going!
 thinkmeltprotonmail.com
thinkmeltprotonmail.com
Luckily for us the authors of the Raspberry pi made the most simplest example from the github page:
 raspberrypi
raspberrypiGoing over the code of the main block:
#include <stdio.h>
#include "pico/stdlib.h"
#include "hardware/gpio.h"
void gpio_callback(uint gpio, uint32_t events) {
// Put the GPIO event(s) that just happened into event_str
// so we can print it
gpio_event_string(event_str, events);
printf("GPIO %d %s\n", gpio, event_str);
}
int main() {
stdio_init_all();
printf("Hello GPIO IRQ\n");
gpio_set_irq_enabled_with_callback(2, GPIO_IRQ_EDGE_RISE | GPIO_IRQ_EDGE_FALL, true, &gpio_callback);
// Wait forever
while (1);
}- gpio_set_irq_enabled_with_callback passes it's parameters to the &gpio_callback assigned function defined above it (ok that's confusing..)
- Explaining this again gpio_set_irq_enabled_with_callback is a function assigning the handler function when the target GPIO pin has a trigger where it goes from high-to-low or GPIO_IRQ_EDGE_FALL.
Searching the internet for the potential values that can be passed are:
GPIO_IRQ_LEVEL_LOW = 0x1u,
GPIO_IRQ_LEVEL_HIGH = 0x2u,
GPIO_IRQ_EDGE_FALL = 0x4u,
GPIO_IRQ_EDGE_RISE = 0x8u,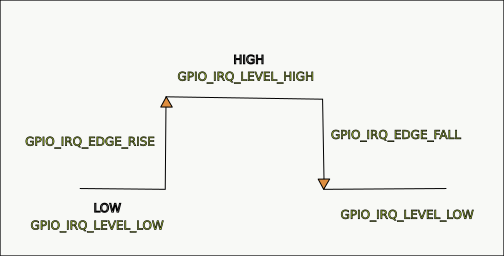
- So naturally if you have a constantly low pin and you set GPIO_IRQ_LEVEL_LOW - it is going to trip and call the interrupt handler function constantly.. Fair enough!
- The gpio_set_irq_enabled_with_callback is defined as:
void gpio_set_irq_enabled_with_callback (uint gpio, uint32_t event_mask, bool enabled, gpio_irq_callback_t callback)
Breaking this down:
- gpio - specify which pin will activate this IRQ.
- event_mask - one or more of GPIO_IRQ_LEVEL_LOW etc etc, separated by a C OR function ( | );
- bool enabled (pass true or false)
- gpio_irq_callback_t callback - specify the function to handle the callback.
Another example:
gpio_set_irq_enabled_with_callback(3, GPIO_IRQ_EDGE_RISE | GPIO_IRQ_EDGE_FALL, true, my_handler_function);From page 60 of the documentation however we see the one catch/gotcha - you are allowed 1 interrupt per GPIO bank?
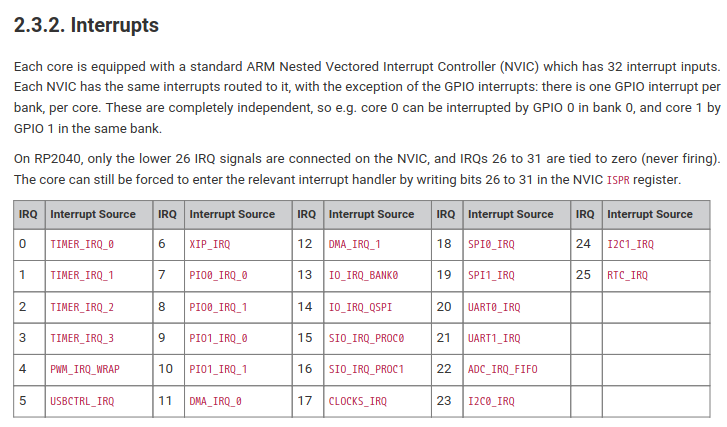
Expanding from This:
It needs to be understood that there is only [one] IRQ handler for the entire bank, as discussed in this thread:
https://forums.raspberrypi.com/viewtopic.php?t=339696
Solves this issue with the following code example:
- Set one IRQ for one pin of one of the four monitor states that you want to monitor.
- Add for each pin that you want to monitor with:
gpio_set_irq_enabled(1, GPIO_IRQ_EDGE_RISE | GPIO_IRQ_EDGE_FALL, true);
gpio_add_raw_irq_handler(1,irqhandler1);
gpio_add_raw_irq_handler(2,irqhandler2);- With the associate handlers:
void irqhandler1() {
if (gpio_get_irq_event_mask(1) & GPIO_IRQ_EDGE_RISE | GPIO_IRQ_EDGE_FALL) {
gpio_acknowledge_irq(1, GPIO_IRQ_EDGE_RISE | GPIO_IRQ_EDGE_FALL);
gpio_xor_mask(0b100);
}
}
void irqhandler2() {
if (gpio_get_irq_event_mask(4) & GPIO_IRQ_EDGE_RISE | GPIO_IRQ_EDGE_FALL) {
gpio_acknowledge_irq(4, GPIO_IRQ_EDGE_RISE | GPIO_IRQ_EDGE_FALL);
gpio_xor_mask(0b100000);
}
}In this instance if there is a GPIO_IRQ_EDGE_RISE or GPIO_IRQ_EDGE_FALL on either pin 1, or 4 it will call the respective irqhandler1(), and irqhandler2().
Compilation Errors:
- You may reach a point where your project stops making the elf2uf2 file!
- Inside your pico-sdk/elf2uf2 folder is a small converter/ compiler application:
- You can copy this as a standalone to your working directory to convert your elf to uf2 binaries that the RPi2040 can work with!
