OctoPrint Camera Setup
In this guide we go over setting up cameras to watch over your 3D print!

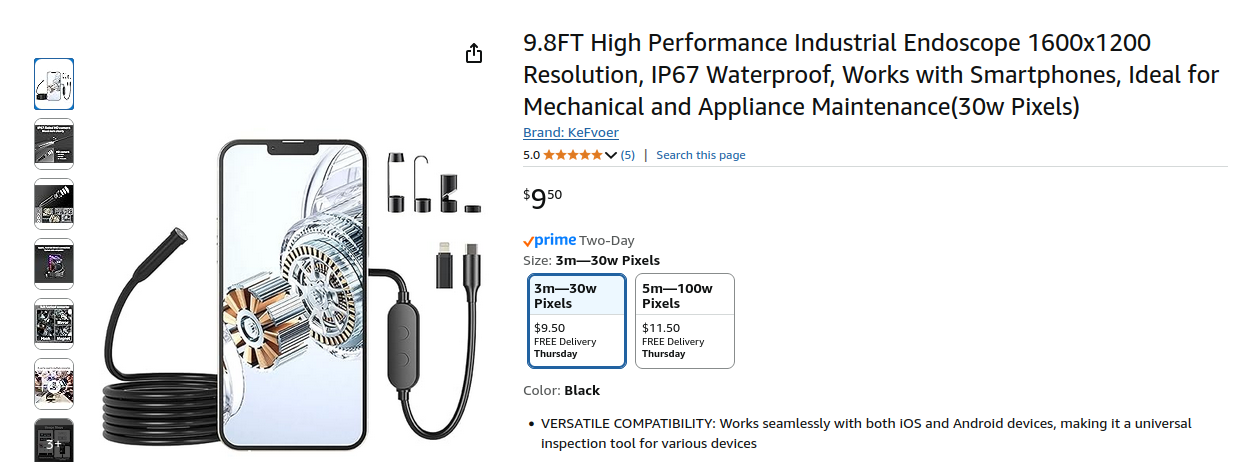
Endoscopes: These are absolutely great, and you can get one for less than $10. They enable you to get very detailed zoom shots of how your print is going, very recommended.
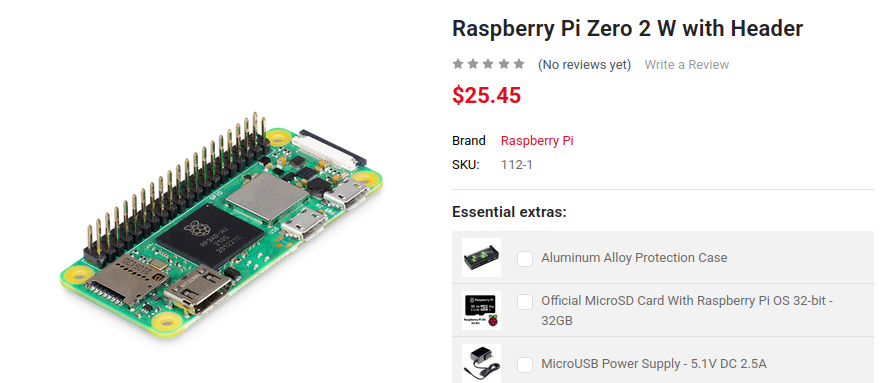
- Note a Raspberry Pi 4 looked to be taxed to run both a Camera, and a streaming Octoprint instance. Since you can buy very cheap Wireless Quad-Core Pi-Zeros for $25/Cdn, it is a no-brainer!
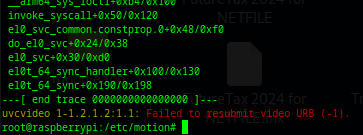
- Understanding if you your device is being recognized. Open an terminal and type:
sudo dmesg -tAs you plug in cameras you should see them come up on the message tail
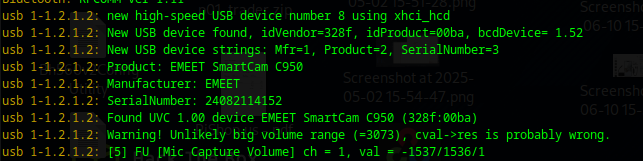
This will give a plethora of diagnostic information and when you plugin your endoscope it should show up:
- We are following portions of this excellent guide
Install your base packages:
sudo apt install autoconf automake build-essential pkgconf libtool git libzip-dev libjpeg-dev gettext libmicrohttpd-dev libavformat-dev libavcodec-dev libavutil-dev libswscale-dev libavdevice-dev default-libmysqlclient-dev libpq-dev libsqlite3-dev libwebp-dev libcamera-v4l2Then set your motion version:
MOTION_VERSION=4.7.0Before pulling the package.
wget https://github.com/Motion-Project/motion/releases/download/release-$MOTION_VERSION/$(lsb_release -cs)_motion_$MOTION_VERSION-1_$(dpkg --print-architecture).deb -O motion.debIt's install will look as:
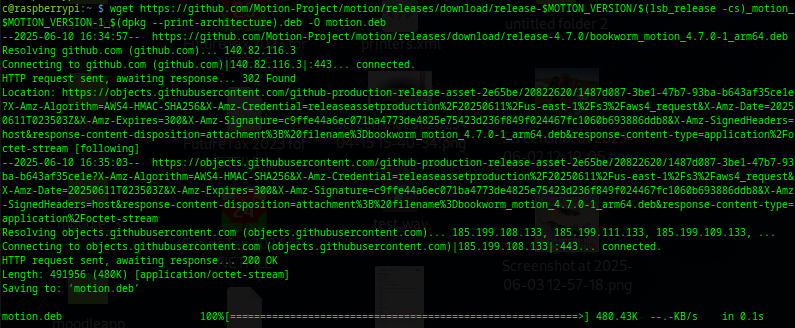
To install:
sudo dpkg -i motion.debThen enable and start it as a systemctl package:
sudo systemctl enable motion && sudo systemctl start motionOnce done - as root you will need to configure motion.conf
sudo nano /etc/motion/motion.confNOTE: Single camera setup / Multiple Camera Setup can be confusing
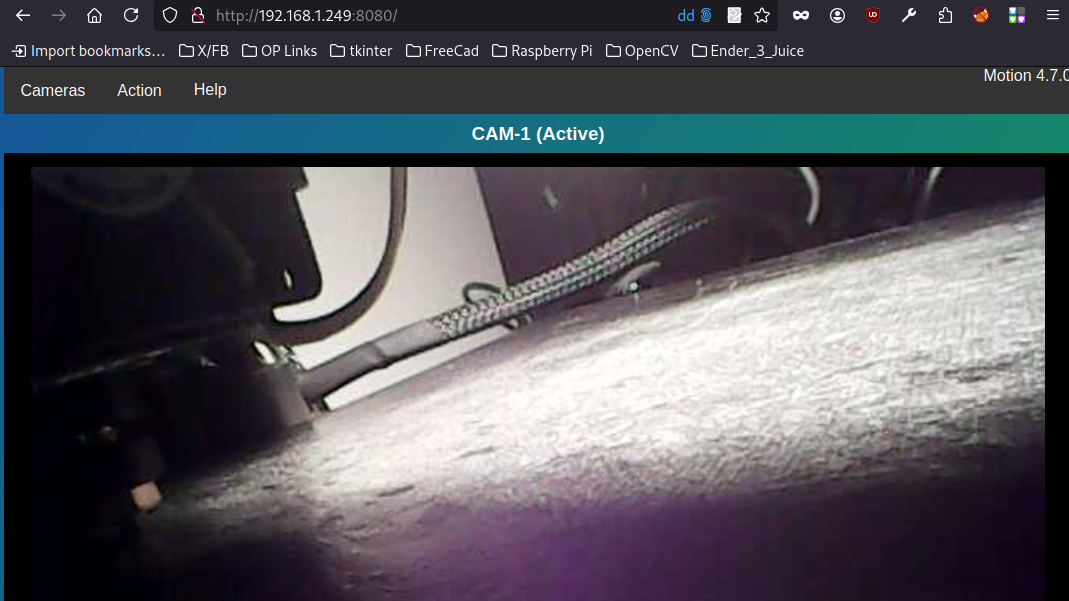
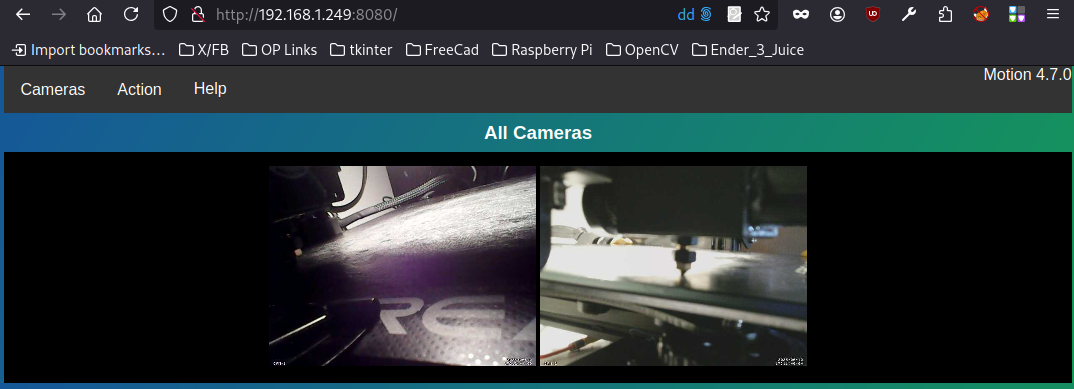
Going to the local IP address of the raspberry pi - to port 8080 we can see both cameras:
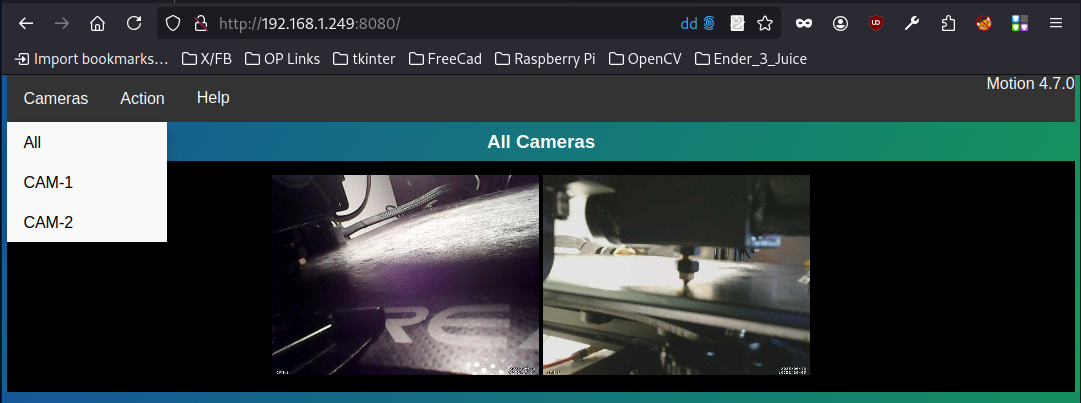
Clicking on each one will show us the individual camera:
This is the setup that worked for us:
sudo nano /etc/motion/motion.conf# Rename this distribution example file to motion.conf
#
# This config file was generated by motion 4.5.1
# Documentation: /usr/share/doc/motion/motion_guide.html
#
# This file contains only the basic configuration options to get a
# system working. There are many more options available. Please
# consult the documentation for the complete list of all options.
#
############################################################
# System control configuration parameters
############################################################
# Start in daemon (background) mode and release terminal.
daemon off
# Start in Setup-Mode, daemon disabled.
setup_mode off
# File to store the process ID.
; pid_file value
# File to write logs messages into. If not defined stderr and syslog is used.
log_file /var/log/motion/motion.log
# Level of log messages [1..9] (EMG, ALR, CRT, ERR, WRN, NTC, INF, DBG, ALL).
log_level 6
# Target directory for pictures, snapshots and movies
target_dir /var/lib/motion
# Video device (e.g. /dev/video0) to be used for capturing.
video_device /dev/video0
# Parameters to control video device. See motion_guide.html
; video_params value
# The full URL of the network camera stream.
; netcam_url value
# Name of mmal camera (e.g. vc.ril.camera for pi camera).
; mmalcam_name value
# Camera control parameters (see raspivid/raspistill tool documentation)
; mmalcam_params value
############################################################
# Image Processing configuration parameters
############################################################
# Image width in pixels.
width 640
# Image height in pixels.
height 480
# Maximum number of frames to be captured per second.
framerate 10
# Text to be overlayed in the lower left corner of images
text_left CAMERA1
# Text to be overlayed in the lower right corner of images.
text_right %Y-%m-%d\n%T-%q
############################################################
# Motion detection configuration parameters
############################################################
# Always save pictures and movies even if there was no motion.
emulate_motion off
# Threshold for number of changed pixels that triggers motion.
threshold 1500
# Noise threshold for the motion detection.
; noise_level 32
# Despeckle the image using (E/e)rode or (D/d)ilate or (l)abel.
despeckle_filter EedDl
# Number of images that must contain motion to trigger an event.
minimum_motion_frames 1
# Gap in seconds of no motion detected that triggers the end of an event.
event_gap 5
# The number of pre-captured (buffered) pictures from before motion.
pre_capture 3
# Number of frames to capture after motion is no longer detected.
post_capture 0
############################################################
# Script execution configuration parameters
############################################################
# Command to be executed when an event starts.
; on_event_start value
# Command to be executed when an event ends.
; on_event_end value
# Command to be executed when a movie file is closed.
; on_movie_end value
############################################################
# Picture output configuration parameters
############################################################
# Output pictures when motion is detected
picture_output off
# File name(without extension) for pictures relative to target directory
picture_filename %Y%m%d%H%M%S-%q
############################################################
# Movie output configuration parameters
############################################################
# Create movies of motion events.
movie_output off
# Maximum length of movie in seconds.
movie_max_time 60
# The encoding quality of the movie. (0=use bitrate. 1=worst quality, 100=best)
movie_quality 45
# Container/Codec to used for the movie. See motion_guide.html
movie_codec mkv
# File name(without extension) for movies relative to target directory
movie_filename %t-%v-%Y%m%d%H%M%S
############################################################
# Webcontrol configuration parameters
############################################################
# Port number used for the webcontrol.
webcontrol_port 8080
# Restrict webcontrol connections to the localhost.
webcontrol_localhost off
# Type of configuration options to allow via the webcontrol.
webcontrol_parms 0
############################################################
# Live stream configuration parameters
############################################################
# The port number for the live stream.
stream_port 8081
# Restrict stream connections to the localhost.
stream_localhost off
##############################################################
# Camera config files - One for each camera.
##############################################################
camera /etc/motion/camera1.conf
camera /etc/motion/camera2.conf
; camera /usr/etc/motion/camera3.conf
; camera /usr/etc/motion/camera4.conf
##############################################################
# Directory to read '.conf' files for cameras.
##############################################################
; camera_dir /usr/etc/motion/conf.d
Inside /etc/motion/camera1.conf
camera_name CAM-1
camera_id AAAAAAA
video_device /dev/video0
text_left CAM-1
stream_port 8083
stream_localhost off
stream_maxrate = 15
Inside /etc/motion/camera2.conf
camera_name CAM-2
camera_id BBBBBBBBB
video_device /dev/video2
text_left CAM-2
stream_port 8084
stream_localhost off
stream_maxrate = 15
Note: Dual Cameras was taxing on a Pi 4. We shut off motion capture save to disk, reduced screen resolution to 640x480, and dropped the frame rates down to 10, it worked a lot better.
Some Screen Shots of it in Action:
Troubleshooting - it can present some problematic issues, we noticed right away one camera was slow.
Embedding it into Octoprint: