Rpi-2040 Development Of a new MiE (micro-ethernet) sync-less two-wire Protocol (Part 1)
In this article the basic concepts of a 'micro-ethernet' is explored and the potential for simultaneous packet signalling across multiple pins.


Atypically the RPi2040 chip-set utilizes the SPI communications bus in order to communicate with devices. It can also use UART. A typical SPI wiring diagram would looks as:
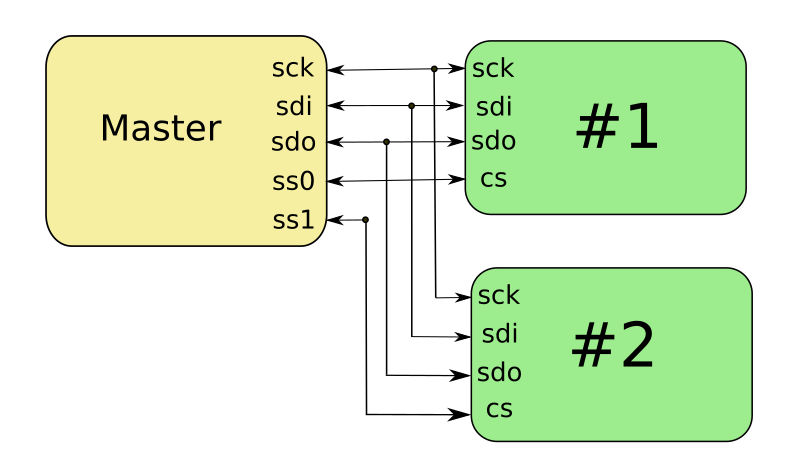
- Only one device can communicate to the Master at a time.
- Every device must have a synchronization clock.
- If you had a large number of devices they could wait literally 1000's of bits before their 'turn' to talk on the bus.
- It is good for a small number of devices. After that it is not really usable in a production multi-tasking system.
- PIO submodules can offload CPU clock cycles.
Adding Micro-Ethernet Links to the Raspberry Pi Pico Environment.
- Being able to route packets between Pico's would allow work to be 'offloaded' to sub-devices that can handle SPI bus calls.
- A syncless protocol not requiring any clock is devised. By doing this it removes a significant number of pins for communication between devices.
- The protocol will allow for simultaneous bit receiving/sending across multiple ports.
- Store-And-Forward packeting as in a standard Ethernet Router would be recommended.
- An example diagram:
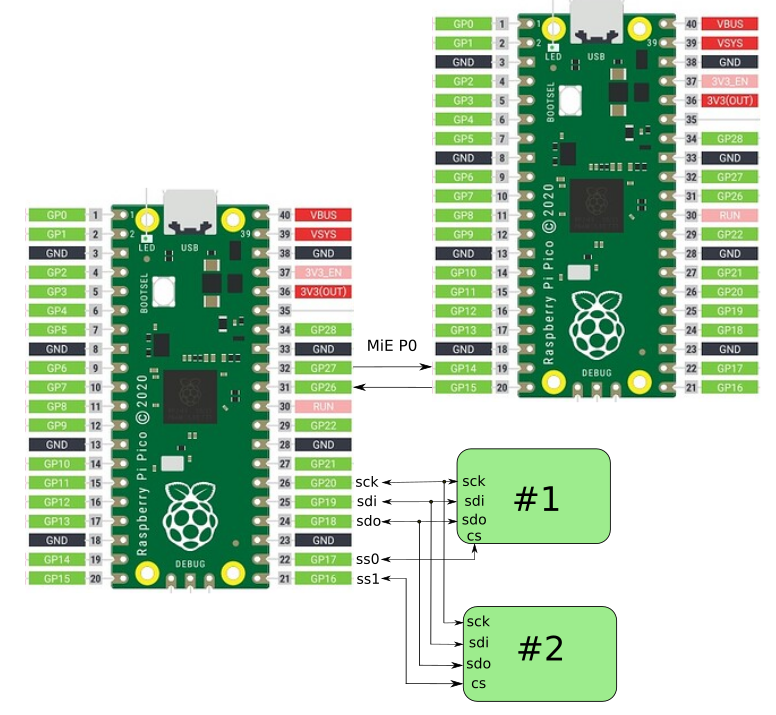
- MiE P0 would offload SPI device #1 and #2 to the sub-pico which would relay the information up to the 'manager.' This could be extended farther as desired.
- Raspberry Pi Pico's are cheap. At $5 / device it becomes very easy to scale.
- Ring CPU computing becomes available. Backup and fall-back
Understanding Variance Timing in Bits
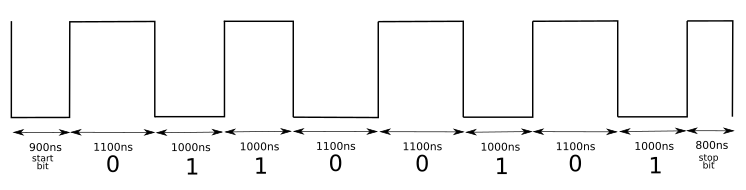
- Normally a bit '1' is the same length as a bit '0'. Consider:
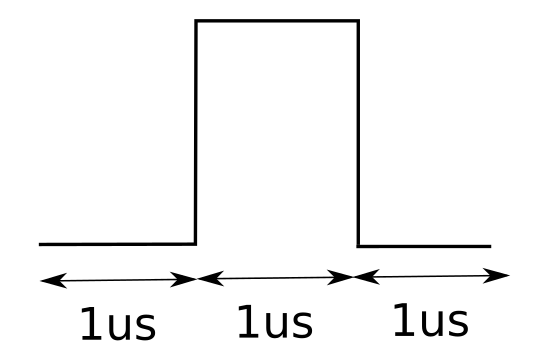
- Instead of uniform bit rates, mathmatically varied bit rates are determined that will define:
- A Stop Bit will be 800 nanoseconds
- A Start Bit will be 900 nanoseconds
- A '1' Bit will be 1000 nanoseconds
- A '0' Bit will be 1100 nanoseconds.
Modified Manchester Coding is developed here thus a '1111' would always have a transistion high-to-low or low-to-high as:
- The high-to-low or low-to-high positions are irrelevant. Only that 1000 ns has expired between transistions.
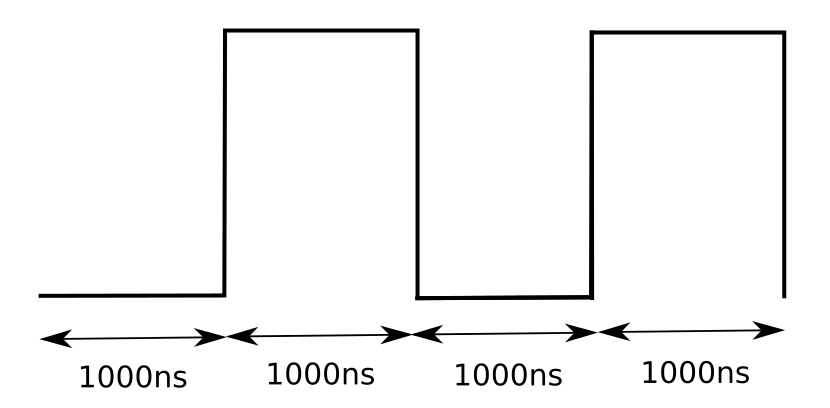
Now expanding on this for a 8-bit 'packet' would look as:
Bit Precision at 125 Mhz
- At 125 Mhz 8 nanosecond precision is available.
- 800 ns Stop pulse would have a timer value of 100 (0x64) clock cycles.
- 900 ns Start pulse would have a timer value 112.5 (0x71) clock cycles.
- 1000 ns '1' pulse would have a timer value of 125 (0x7D) clock cycles.
- 1100 ns '0' pulse would have a timer value of 137.5 (0x8A) clock cycles.
An example block of code to set / test the TICKINT itself:
- function must be named isr_systick() as:
void isr_systick()
{
printf("Tick fired\n");
systick_hw->csr = 0x7;
systick_hw->rvr = 0x00FFFFFF;
}- Setting a 0x00FFFFFF will trip the interrupt every 0.134 seconds.
Initial setup inside main:
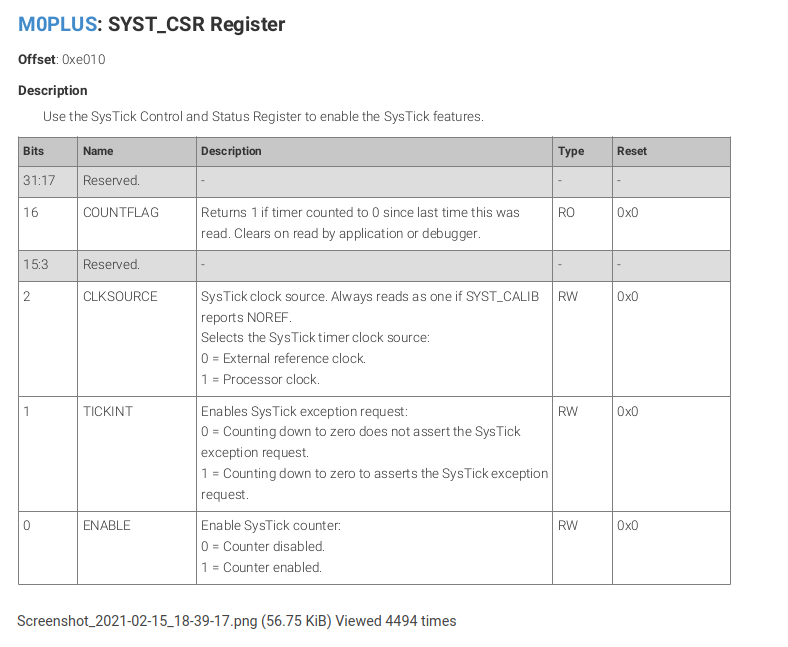
systick_hw->csr = 0x07;
systick_hw->rvr = 0x00FFFFFF;The SYST_CSR Register. When we set:
systick_hw->csr = 0x7;- Bit 2 CLKSOURCE = 1 (Use Processor Clock)
- Bit 1 TICKINT = 1 (Counting Down to 0 asserts Systick interrupt)
- Bit 0 ENABLE = 1 (Counter itself is enabled)
Summary:
- Not only can a standard 'data packet' be defined, by simply reversing the start/stop bit orders a 'control packet' can be defined that can signal back speed control, management, setup channels etc.
- These timing differentials are 'tight.' it may require expansion out to 1500 or 2000 ns as the end goal is not to only signal 1 pin but to potentially signal multple pins in parallel while reading others.
- This may suggest that a pulse width be defined as 1500 x number of active pins.
- Next a protocol definition will be required that will allow for a small addressing space for the 'micro-ethernet protocol, and the concept of multiplex bit encoding of packets from a single clock interrupt source.
